Technische Komponenten
Um Messungen durchführen zu können, mussten verschiedene Sensoren eingebaut, verschaltet und ausgelesen werden. Hierzu übernahmen wir die vom Wettbewerb gegebenen Sensoren sowie den Mikroprozessor. Wir fügten später jedoch noch eigene Details wie ein Radiation-Board und eine Heizung hinzu.Vom Wettbewerb her waren folgende Messgrößen vorgegeben und jeweils zugehörige Sensoren bereitgestellt:
- Temperatur (innen/außen)
- Relative Luftfeuchte (innen/außen)
- Luftdruck
- Position
- die kosmische Strahlung, um die Strahlenbelastung in der Höhe auf beispielsweise Piloten oder Vielflieger zu untersuchen.
Der Mikroprozessor überwacht alle elektronischen Sensoren und Aktoren, steuert diese an und liest sie aus. Die Messungen der Sensordaten werden im 5 Sekunden-Takt auf eine Micro-SD-Karte gespeichert und können somit später verglichen und ausgewertet werden. Um diese Komponenten sicher und kompakt zu verschalten, entwarfen wir außerdem eine eigene Platine und druckten mit Hilfe eines 3D-Druckers einen selbst entworfenen Rahmen, der das ganze System aufgeräumt und strukturiert in der Box organisiert.
Mikroprozessor
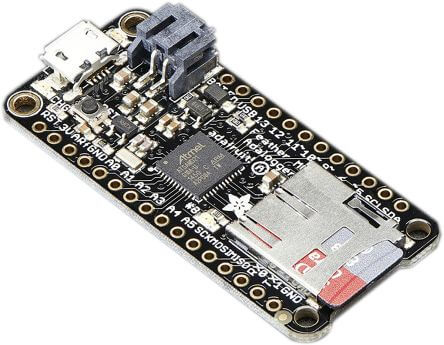
Abb. 1: Feather M0 Adalogger
Herzstück des Aufbaus ist der Feather M0 Adalogger der Firma Adafruit.
Dieses Mikroprozessorboard ist auf Basis der populären und reichlich dokumentierten Arduino-Plattform aufgebaut,
welche es grundsätzlich jedem ermöglicht, das Arbeiten mit Mikroprozessoren zu erlernen.
Der Prozessor arbeitet mit 3.3V und benötigt unter 50mA Strom. Außerdem ist er im Gegensatz zum Einsteigermodell, dem Arduino UNO, drei Mal schneller und bietet das Achtfache an FLASH-Speicher für Programmcode.
Für die Auswahl sprachen unter anderem das niedrige Gewicht von 5.3 Gramm und die geringe Größe von 51mm x 23mm x 8mm.
Ausschlaggebend war jedoch der auf dem Mikroprozessorboard integrierte Micro-SD-Karten-Slot, welcher ein direktes Speichern der Messdaten ermöglicht, ohne zusätzliche Verbindungen zu beanspruchen.
Wir verzichteten auf das Verwenden eines Einplatinencomputers wie beispielsweise den Raspberry Pi. Die vollwertige Rechenleistung eines kleinen Computers und der Stromverbrauch von 2A waren für unsere Dimensionen völlig ungeeignet.
Der Prozessor arbeitet mit 3.3V und benötigt unter 50mA Strom. Außerdem ist er im Gegensatz zum Einsteigermodell, dem Arduino UNO, drei Mal schneller und bietet das Achtfache an FLASH-Speicher für Programmcode.
Für die Auswahl sprachen unter anderem das niedrige Gewicht von 5.3 Gramm und die geringe Größe von 51mm x 23mm x 8mm.
Ausschlaggebend war jedoch der auf dem Mikroprozessorboard integrierte Micro-SD-Karten-Slot, welcher ein direktes Speichern der Messdaten ermöglicht, ohne zusätzliche Verbindungen zu beanspruchen.
Wir verzichteten auf das Verwenden eines Einplatinencomputers wie beispielsweise den Raspberry Pi. Die vollwertige Rechenleistung eines kleinen Computers und der Stromverbrauch von 2A waren für unsere Dimensionen völlig ungeeignet.
GPS / GSM Tracker
Abb. 2: GPS/GSM Tracker
Um die Position der Sonde zu erfahren, bauten wir einen GPS Tracker ein, der die Position über GSM (Global System for Mobile Communications) an ein Handy übermittelte.
Die Positionsbestimmung geschieht wie folgt: Nach einem kurzen Anruf des Trackers über die Telefonnummer der eingelegten und aufgeladenen Sim-Karte erhält man nach kurzer Zeit via SMS die aktuellen Koordinaten des Trackers. Diese können daraufhin in einen Kartendienst wie beispielsweise Google Maps eingegeben werden, wodurch eine Navigation zum Zielpunkt möglich ist.
Zu beachten war jedoch der horizontale Abstrahlwinkel der Mobilfunk-Antennen von nur 5 bis 10°. Hierdurch war das Empfangen der Koordinaten ab etwa 1000m über dem Grund nicht mehr möglich und man musste mit der genauen Positionsbestimmung der Sonde warten, bis diese wieder tief genug gefallen war.
Die Positionsbestimmung geschieht wie folgt: Nach einem kurzen Anruf des Trackers über die Telefonnummer der eingelegten und aufgeladenen Sim-Karte erhält man nach kurzer Zeit via SMS die aktuellen Koordinaten des Trackers. Diese können daraufhin in einen Kartendienst wie beispielsweise Google Maps eingegeben werden, wodurch eine Navigation zum Zielpunkt möglich ist.
Zu beachten war jedoch der horizontale Abstrahlwinkel der Mobilfunk-Antennen von nur 5 bis 10°. Hierdurch war das Empfangen der Koordinaten ab etwa 1000m über dem Grund nicht mehr möglich und man musste mit der genauen Positionsbestimmung der Sonde warten, bis diese wieder tief genug gefallen war.
Kamera

Abb. 3: Rollei Actioncam 425
Außerdem installierten wir eine Actionkamera an der Unterseite der Sonde, welche uns atemberaubende Aufnahmen aus der Luft lieferte.
Einige der Fotos haben wir auf dieser Webseite unter http://stratosat.de/fotos veröffentlicht.
Benutzt wurde die "Rollei Actioncam 425". Diese bietet gute Aufnahmen und ist im Gegensatz zum Marktführer GoPro um ein Vielfaches günstiger.
Benutzt wurde die "Rollei Actioncam 425". Diese bietet gute Aufnahmen und ist im Gegensatz zum Marktführer GoPro um ein Vielfaches günstiger.
DHT22 (außen)
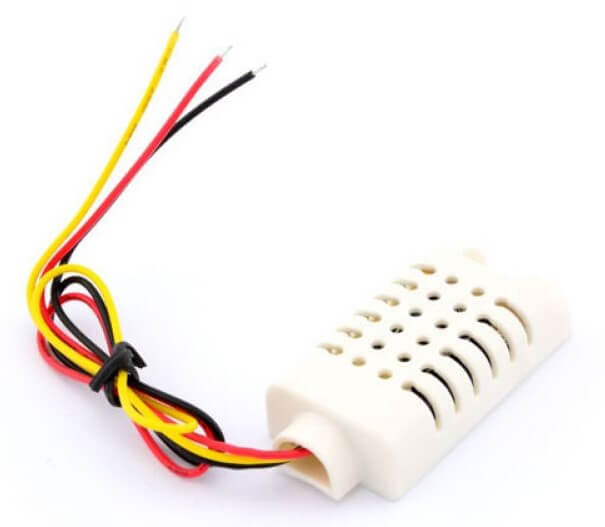
Abb. 4: DHT22
Messgrößen: Temperatur | Luftfeuchtigkeit
Messbereich: -40°C…+80°C | 0…100% rH
Dieser Sensor bietet neben dem kompakten Design den Vorteil, dass zwei Messgrößen digital über ein Kabel übertragen werden können. Dies ist präzise und reduziert zudem den Aufwand bei der Verkabelung.
Wir verwendeten zum Auslesen des Sensors eine vorgeschriebene Programmbibliothek, da dieser über ein eigenes 1-Kabel-Protokoll mit dem Mikroprozessor kommuniziert.
Ein Nachteil ist jedoch der begrenzte Messbereich. Da wir während des Fluges Temperaturen unter -40°C erreichten, fehlten uns später Messgrößen.
Messbereich: -40°C…+80°C | 0…100% rH
Dieser Sensor bietet neben dem kompakten Design den Vorteil, dass zwei Messgrößen digital über ein Kabel übertragen werden können. Dies ist präzise und reduziert zudem den Aufwand bei der Verkabelung.
Wir verwendeten zum Auslesen des Sensors eine vorgeschriebene Programmbibliothek, da dieser über ein eigenes 1-Kabel-Protokoll mit dem Mikroprozessor kommuniziert.
Ein Nachteil ist jedoch der begrenzte Messbereich. Da wir während des Fluges Temperaturen unter -40°C erreichten, fehlten uns später Messgrößen.
BME280 (innen)

Abb. 5: BME280
Messgrößen: Temperatur | Luftfeuchtigkeit | Druck
Messbereich: -40...+85 °C | 0...100 % rH | 300...1100 hPa
Der BME280 wird über das sogenannte I2C (Inter-integrated circuit) Protokoll angesteuert.
Die Stärke dieses Protokolls liegt in der geringen Anzahl der dafür benötigten Leiterbahnen. Während man bei anderen Protokollen wie dem SPI (Serial Peripheral Interface Bus) Protokoll mindestens 4 Anschlüsse (Pins) benötigt, arbeitet das I2C Protokoll nur mit 2 Pins - einem Datenkanal und Taktgeberkanal. Diese übernehmen die komplette Kommunikation zwischen Sensor und Mikroprozessor. Der Taktgeberkanal vereinfacht die Implementierung einer Software, da somit die Übertragungsgeschwindigkeit konstant ist. Eine solche Implementierung war bereits in der Arduino-Umgebung vorhanden.
Ferner war es auf Grund der kleinen Anzahl an Pins für das I2C Protokoll und der kleinen Größe des Sensors einfacher, das Layout der Platine zu erstellen.
Messbereich: -40...+85 °C | 0...100 % rH | 300...1100 hPa
Der BME280 wird über das sogenannte I2C (Inter-integrated circuit) Protokoll angesteuert.
Die Stärke dieses Protokolls liegt in der geringen Anzahl der dafür benötigten Leiterbahnen. Während man bei anderen Protokollen wie dem SPI (Serial Peripheral Interface Bus) Protokoll mindestens 4 Anschlüsse (Pins) benötigt, arbeitet das I2C Protokoll nur mit 2 Pins - einem Datenkanal und Taktgeberkanal. Diese übernehmen die komplette Kommunikation zwischen Sensor und Mikroprozessor. Der Taktgeberkanal vereinfacht die Implementierung einer Software, da somit die Übertragungsgeschwindigkeit konstant ist. Eine solche Implementierung war bereits in der Arduino-Umgebung vorhanden.
Ferner war es auf Grund der kleinen Anzahl an Pins für das I2C Protokoll und der kleinen Größe des Sensors einfacher, das Layout der Platine zu erstellen.
GPS-Modul
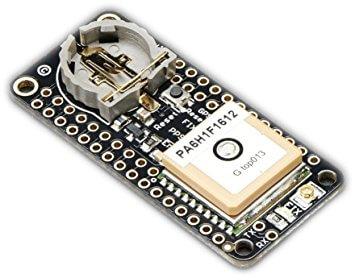
Abb. 6: Ultimate GPS Feather-Wing
Über den Ultimate GPS FeatherWing von Adafruit lässt sich die Position der Sonde mittels GPS (Global Positioning System) mit einer Empfindlichkeit
von -165 dBm über bis zu 22 Satelliten bestimmen.
Eine Knopfzelle sorgt für die Aufrechterhaltung der Stromversorgung der integrierten Echtzeituhr und des Speichers, welcher Einstellungen wie Übertragungsrate (9600 Baud) der seriellen Schnittstelle speichert [1].
Hierdurch ist es außerdem möglich, die sogenannten "Almanach-Daten", die Bahndaten der Satelliten, zu speichern und die Position der Satelliten vorherzusagen, wodurch ein schnelleres Starten des Moduls (Warmstart) von nur wenigen Sekunden möglich ist. Diese Dauer, welche benötigt wird, um die zur Positionsbestimmung notwendigen Satelliten zu finden, nennt man „Time to first fix“ (TTFF) [2].
Die Positionsdaten werden mittels ASCII-Code (American Standard Code for Information Interchange) nach dem Aufbau des NMEA-Formats (National Marine Electronics Association) [3] über die serielle Schnittstelle übertragen. Hier bietet Adafruit eine passende Programmbibliothek an, welche uns das Auslesen der Daten deutlich vereinfacht hat.
Jedoch konnten wir die Position der Sonde während des Fluges nicht komplett aufzeichnen, da das Modul Aussetzer hatte.
Als Ursache hierfür lässt sich die seitliche Ausrichtung der auf dem Board befindlichen Antenne nennen. Diese sollte für optimale Ergebnisse jedoch zum Himmel zeigen.
Eine Knopfzelle sorgt für die Aufrechterhaltung der Stromversorgung der integrierten Echtzeituhr und des Speichers, welcher Einstellungen wie Übertragungsrate (9600 Baud) der seriellen Schnittstelle speichert [1].
Hierdurch ist es außerdem möglich, die sogenannten "Almanach-Daten", die Bahndaten der Satelliten, zu speichern und die Position der Satelliten vorherzusagen, wodurch ein schnelleres Starten des Moduls (Warmstart) von nur wenigen Sekunden möglich ist. Diese Dauer, welche benötigt wird, um die zur Positionsbestimmung notwendigen Satelliten zu finden, nennt man „Time to first fix“ (TTFF) [2].
Die Positionsdaten werden mittels ASCII-Code (American Standard Code for Information Interchange) nach dem Aufbau des NMEA-Formats (National Marine Electronics Association) [3] über die serielle Schnittstelle übertragen. Hier bietet Adafruit eine passende Programmbibliothek an, welche uns das Auslesen der Daten deutlich vereinfacht hat.
Jedoch konnten wir die Position der Sonde während des Fluges nicht komplett aufzeichnen, da das Modul Aussetzer hatte.
Als Ursache hierfür lässt sich die seitliche Ausrichtung der auf dem Board befindlichen Antenne nennen. Diese sollte für optimale Ergebnisse jedoch zum Himmel zeigen.
Radiation-Board
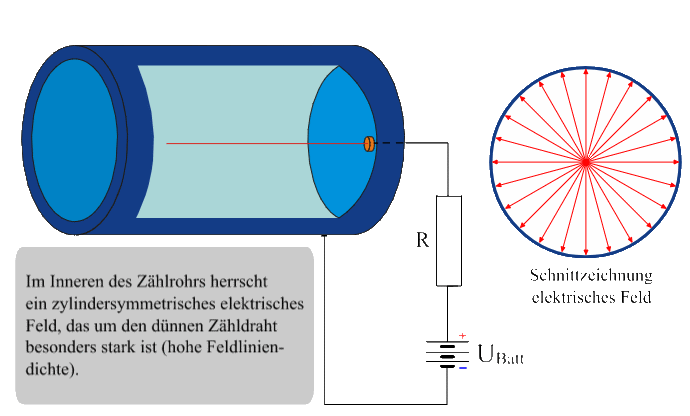
Abb. 7: Skizze Geiger-Müller-Zählrohr
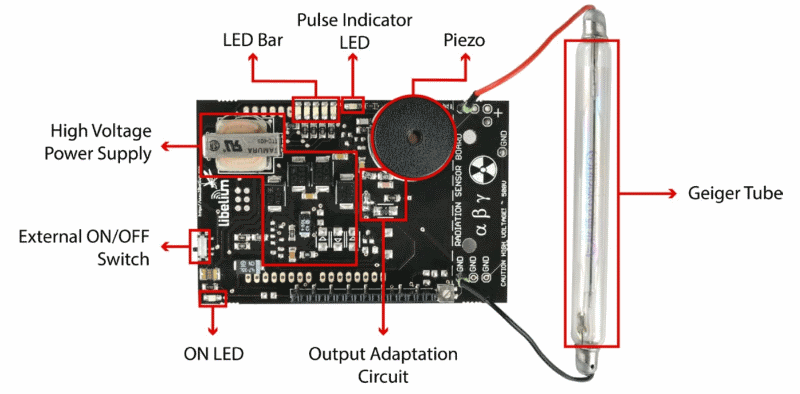
Abb. 8: Radiation Board
Das Radiation-Board von Libelium zählt die Anzahl der Ionisationen durch radioaktive Strahlung in einem Geiger-Müller-Zählrohr.
Ein Geiger-Müller-Zählrohr (GMZ) ist ein Messinstrument zum Nachweis von radioaktiver Strahlung.
Der Mantel des Zählrohrs ist elektrisch leitfähig und bildet die Kathode. In der Mitte des Rohrs befindet sich der Zähldraht. Dieser bildet die Anode. Zwischen Mantel und Zähldraht liegt eine Spannung von ca. 500V an, wodurch ein elektrisches Feld entsteht.
Fliegen Teilchen der radioaktiven Strahlung durch das Zählrohr, so ionisieren sie das Füllgas im Innern. Die durch Ionisation entstandenen Elektronen werden durch das zylindrische elektrische Feld (siehe Abb. 7) stark zum Draht hin beschleunigt, wodurch weitere Ionisationen stattfinden und sich Elektronenlawinen bilden. Da sich das Zählrohr beim Auftreffen der Lawinen auf dem Zähldraht entlädt, lässt sich ein Spannungsabfall am in Reihe geschalteten Widerstand messen (siehe Abb. 7). Die Impulse durch Elektronenlawinen werden dann von einem Zähler registriert [4].
Registriert werden jedoch nur β- und γ-Strahlung, da α-Strahlung schon am Glas des Zählrohrs abgeschirmt wird.
Das Radiation-Board verarbeitet diese Impulse und gibt über einen Piezo-Lautsprecher und eine LED ein akustisches und visuelles Signal ab, wenn radioaktive Strahlung registriert wird.
Durch die Library des Herstellers sind die Messwerte dann einfach zu verarbeiten.
Nach dem Flug konnten wir somit die Messungen auswerten und Schlüsse über die Belastung von kosmischer Strahlung für Piloten und Vielflieger ziehen.
Ein Geiger-Müller-Zählrohr (GMZ) ist ein Messinstrument zum Nachweis von radioaktiver Strahlung.
Der Mantel des Zählrohrs ist elektrisch leitfähig und bildet die Kathode. In der Mitte des Rohrs befindet sich der Zähldraht. Dieser bildet die Anode. Zwischen Mantel und Zähldraht liegt eine Spannung von ca. 500V an, wodurch ein elektrisches Feld entsteht.
Fliegen Teilchen der radioaktiven Strahlung durch das Zählrohr, so ionisieren sie das Füllgas im Innern. Die durch Ionisation entstandenen Elektronen werden durch das zylindrische elektrische Feld (siehe Abb. 7) stark zum Draht hin beschleunigt, wodurch weitere Ionisationen stattfinden und sich Elektronenlawinen bilden. Da sich das Zählrohr beim Auftreffen der Lawinen auf dem Zähldraht entlädt, lässt sich ein Spannungsabfall am in Reihe geschalteten Widerstand messen (siehe Abb. 7). Die Impulse durch Elektronenlawinen werden dann von einem Zähler registriert [4].
Registriert werden jedoch nur β- und γ-Strahlung, da α-Strahlung schon am Glas des Zählrohrs abgeschirmt wird.
Das Radiation-Board verarbeitet diese Impulse und gibt über einen Piezo-Lautsprecher und eine LED ein akustisches und visuelles Signal ab, wenn radioaktive Strahlung registriert wird.
Durch die Library des Herstellers sind die Messwerte dann einfach zu verarbeiten.
Nach dem Flug konnten wir somit die Messungen auswerten und Schlüsse über die Belastung von kosmischer Strahlung für Piloten und Vielflieger ziehen.
Quellen:
[1] lady ada: "Adafruit Ultimate GPS". In: https://cdn-learn.adafruit.com/
[2] A. GmbH: "Kaltstart? Warmstart? Wie lange braucht ein GPS zum Starten?". In: http://gps-camera.eu/
[3] Wikipedia: "NMEA 0183 - Wikipedia". In: https://de.wikipedia.org/
[4] J. H. Stiftung: "GEIGER-MÜLLER-Zählrohr | LEIFI Physik". In: https://www.leifiphysik.de/
[5] L. C. D. S.L.: "Radiation board Technical Guide". In: http://www.libelium.com/
Bildquellen:
Abb. 1: Feather M0 Adalogger. https://media.
Abb. 2: GPS-Tracker. https://static.
Abb. 3: Rollei Actioncam. https://img.
Abb. 4: DHT22. https://www.
Abb. 5: BME280. https://images-na.
Abb. 6: GPS-Sensor. https://images-na.
Abb. 7: Geiger-Müller-Zählrohr. https://www.leifiphysik.de/
Abb. 8: Radiation Board. http://www.libelium.com/